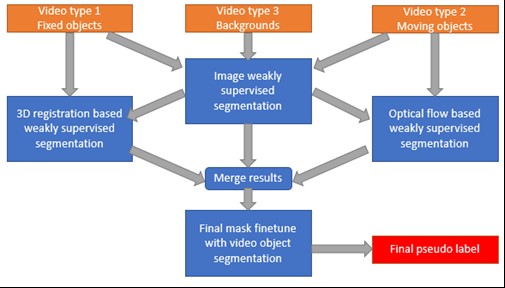
視覺場景分析是構建智慧工廠中所需要面對的一個基本問題,這項技術可以幫助減少在生產過程中人員的參與。我們的研究致力於提高工業製造中機器人的視覺能力及靈活性。儘管場景理解問題在深度學習的幫助下取得了長足的進步,我們仍然面臨許多未解決的問題。目前已有的強監督解決方法需要大量的人力資源來對數據進行像素級別的標注,這是應用落地的一項主要瓶頸。在本項目中,我們提出了一種弱監督方法可以降低標注成本且提高標注工作效率。我們設計了三種不同的子方法協同產生最終的偽標簽,在這個過程中我們僅僅需要視頻級別的標簽作爲監督信息。
此外,工業場景中的數據通常是有別於公開數據集的。通常的深度學習方法需要大量數據的支持。對於新增的語義類別,深度學習方法通常需要利用新數據和原數據一同訓練以達到好的訓練效果。由於新類別的增加,網絡結構每次也需要進行更新。這些原因使得深度學習在實際應用中面臨較高的成本問題。在這項工作中我們使用增量學習技術,讓網絡只需要用新增數據去更新微調。 我們研發的這項技術與現有實力分割方法兼容,可以對場景中的物體實時進行像素級別的識別和定位
Inaugurated on 1 July 1991, Nanyang Technological University (NTU) started out as a teaching university which has today transformed into a research-intensive global university. Its predecessor institution, Nanyang Technological Institute (NTI), was set up in 1981 on the grounds of the former Nanyang University to educate practice-oriented engineers for the burgeoning Singapore economy. In 1991, NTI was reconstituted as Nanyang Technological University, incorporating the National Institute of Education. The alumni rolls of the former Nanyang University were transferred to NTU in 1996. NTU became autonomous in 2006 and is today one of the two largest public universities in Singapore.
Digital Virtual Cockpit (DVC) with Advanced Driver Assistance System (ADAS) Showcasing End to End Silicon and System Capabilities
Method and apparatus for extending local area network protocols to work across the internet and establishing connectivity without discovery for local area network protocols

epitaxy systems based on AIXaTECH’s patented low-temperature single crystal deposition technology
Automatic logistic container ID recognition video analytics software
技術成熟度:雛型
展示目的:可交易專利
流通方式:技術授權/合作
*服務單位
*姓名
*電話
*您參觀這項展品的主要目的?
*您是否希望進一步洽談
*您的職務類別
*展覽整體評價
*最喜歡的展區
*期待展覽著重的技術領域
*是否願意收到電子報/最新資訊
其他建議
敬請期待!