Human-Robot Co-Dancing: A Computer Vision-Based, No-Code, Intuitive Robot Arm Choreography Interface and Human-Robot Collaborative Creation System

Technology Introduction:
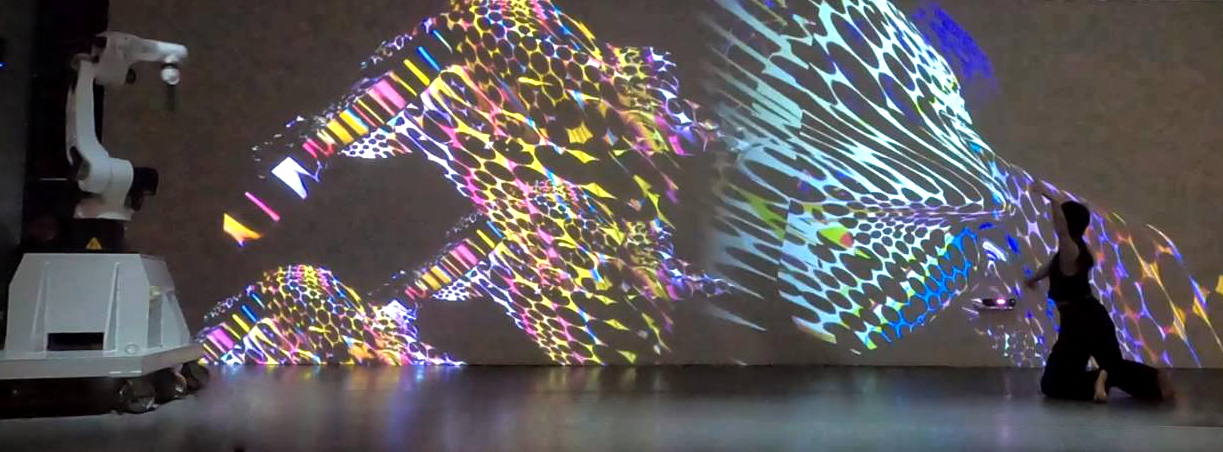
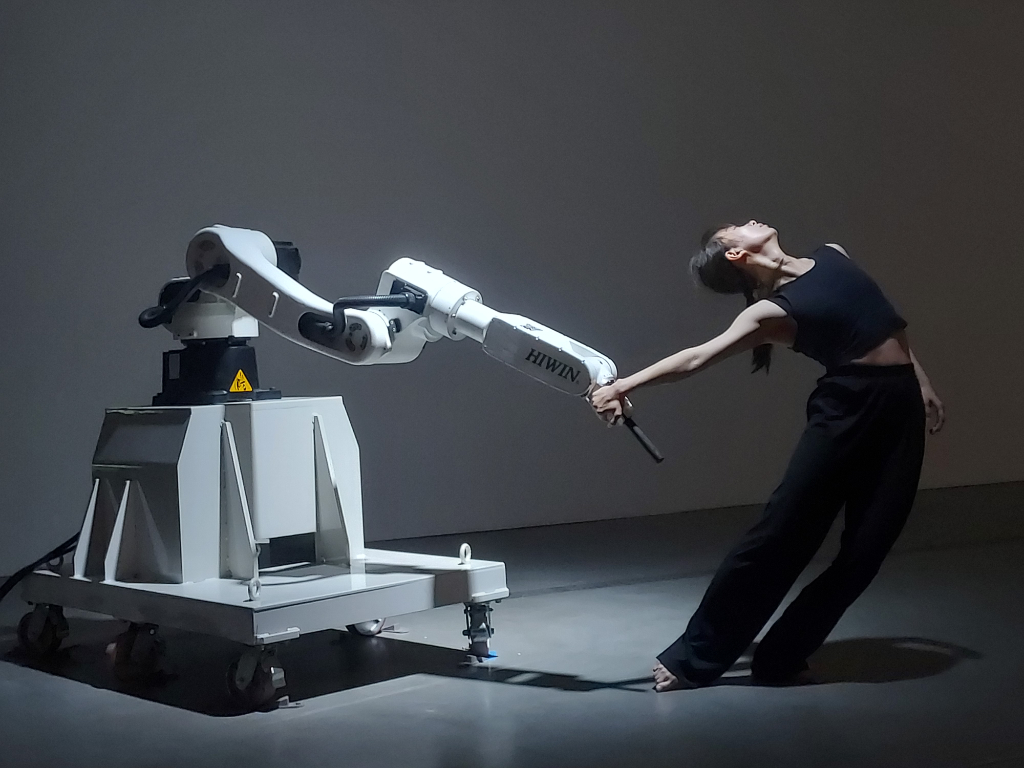
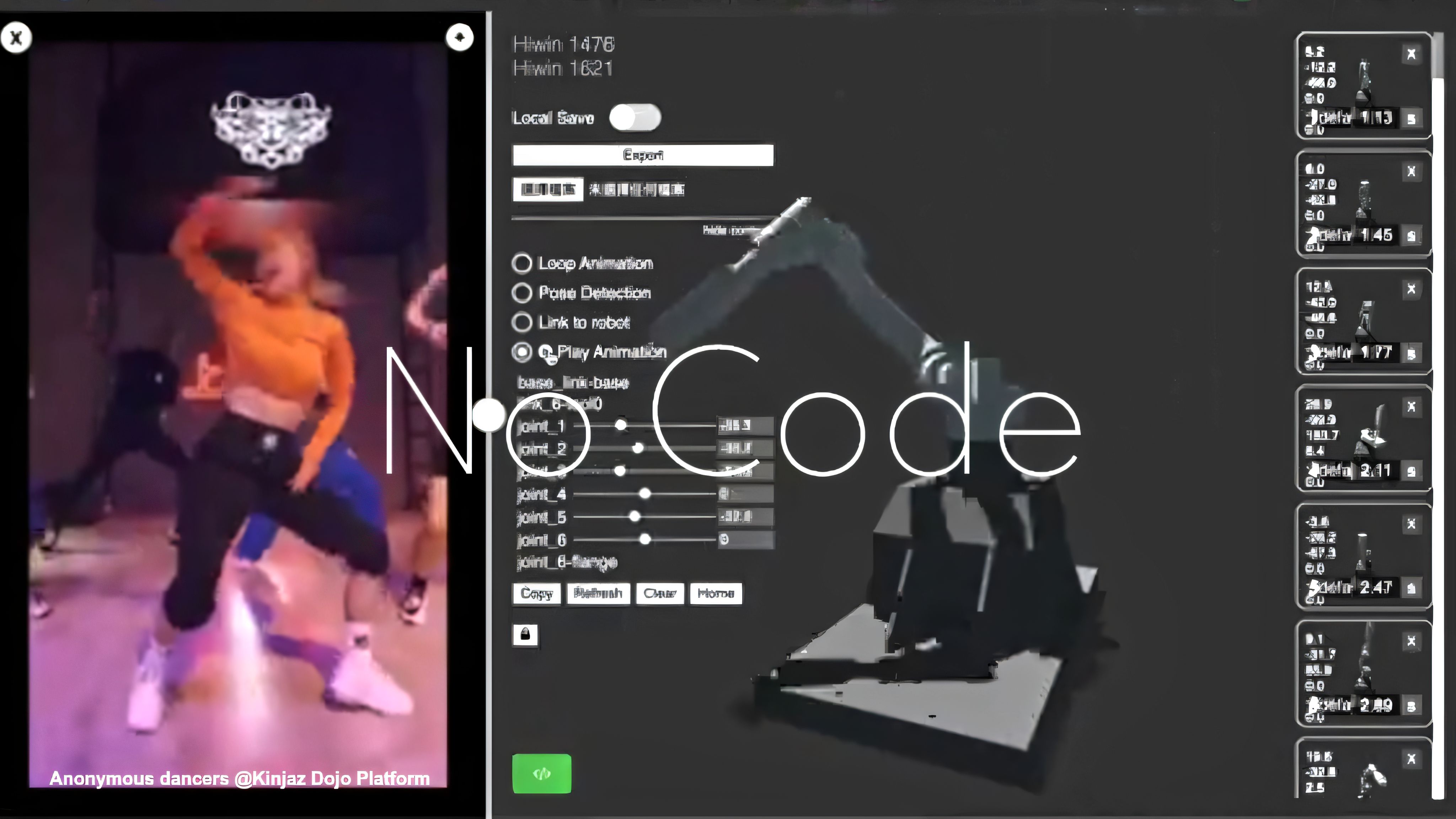
The project of "Human-Robot Dance" targets intuitive, no-code robotic arm control, enabling artists to co-create using body language. Two main workflows were developed: Teach (Offline), where a dancer's movements are captured, processed, translated, and then reproduced by the arm; and Mirror (Online), where real-time pose perception and data translation allow the arm to synchronously mimic the dancer for improvisational co-dance.
Industry Applicability:
This project's technologies including intuitive robot teaching, real-time motion capture, and AI-driven motion translation offer vast potential. In Human-Robot Collaboration, they address skill gaps in smart manufacturing and construction, enabling flexible, safe co-working and fostering digital craftsmanship. In Techno Art, these tools empower artists with direct, intuitive expression, creating novel interactive experiences and allowing exploration of Human-Robot Co-Creation.
National Cheng Kung University (NCKU) envisions its campus as a place that nurtures imagination, grounded in solid academic research and high-quality learning. The university is committed to fostering urban development and global sustainability as part of its centennial mission. By breaking institutional barriers and strengthening interdisciplinary teaching and research, NCKU encourages students to recognize social issues, produce research that meets societal needs, and actively engage in solving global challenges—reflecting its responsibility as a leading university.
Name:
Phone:06-275-7575 #54151
Address:No.1, Daxue Rd., East Dist., Tainan City 701, Taiwan (R.O.C.)
TWI831531B
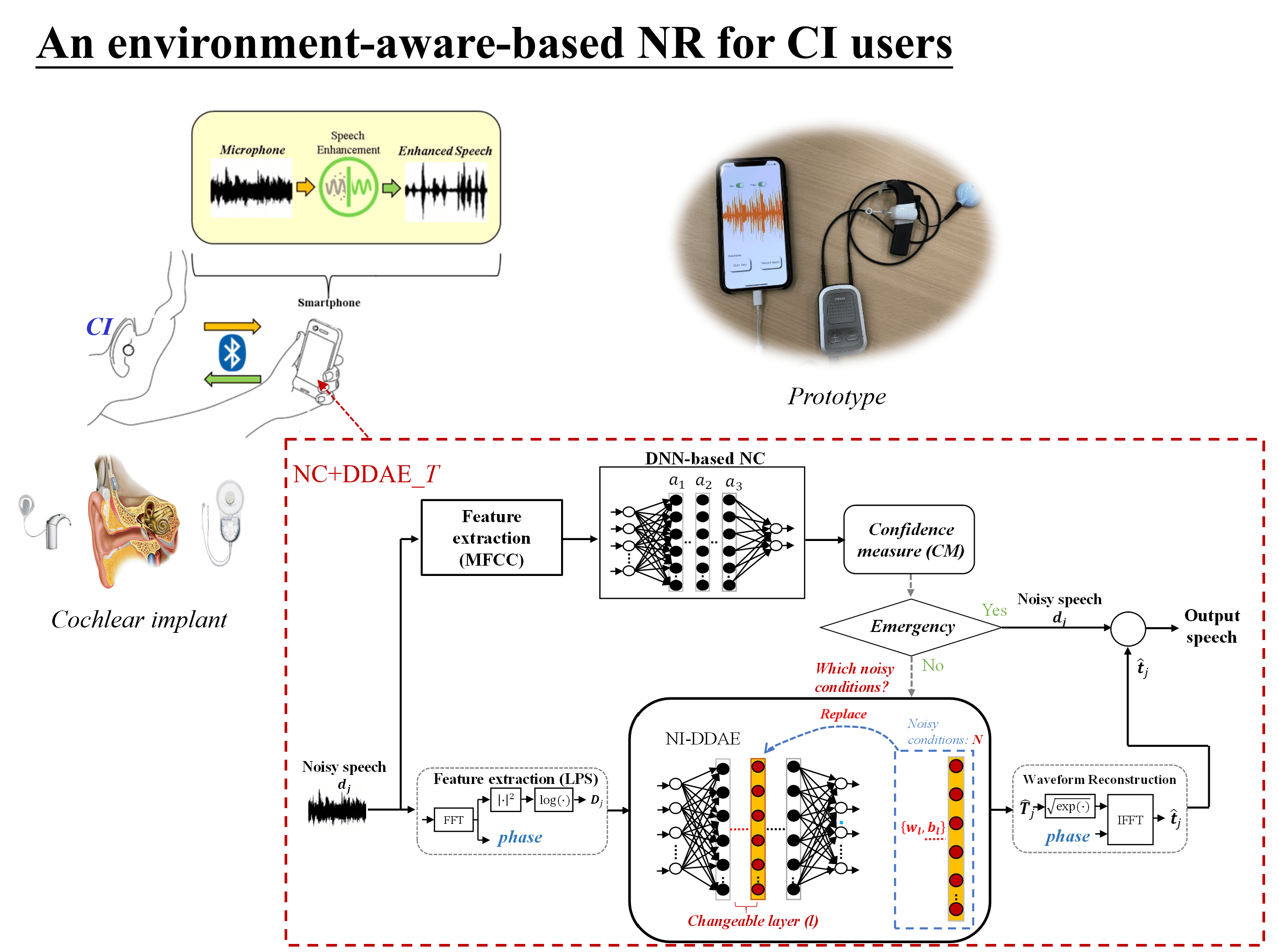
Bionic Organ of Precision Hearing: Deep Learning-Based Neural Network AIoT Approach for Noise Reduction in Next Generation Cochlear Implant
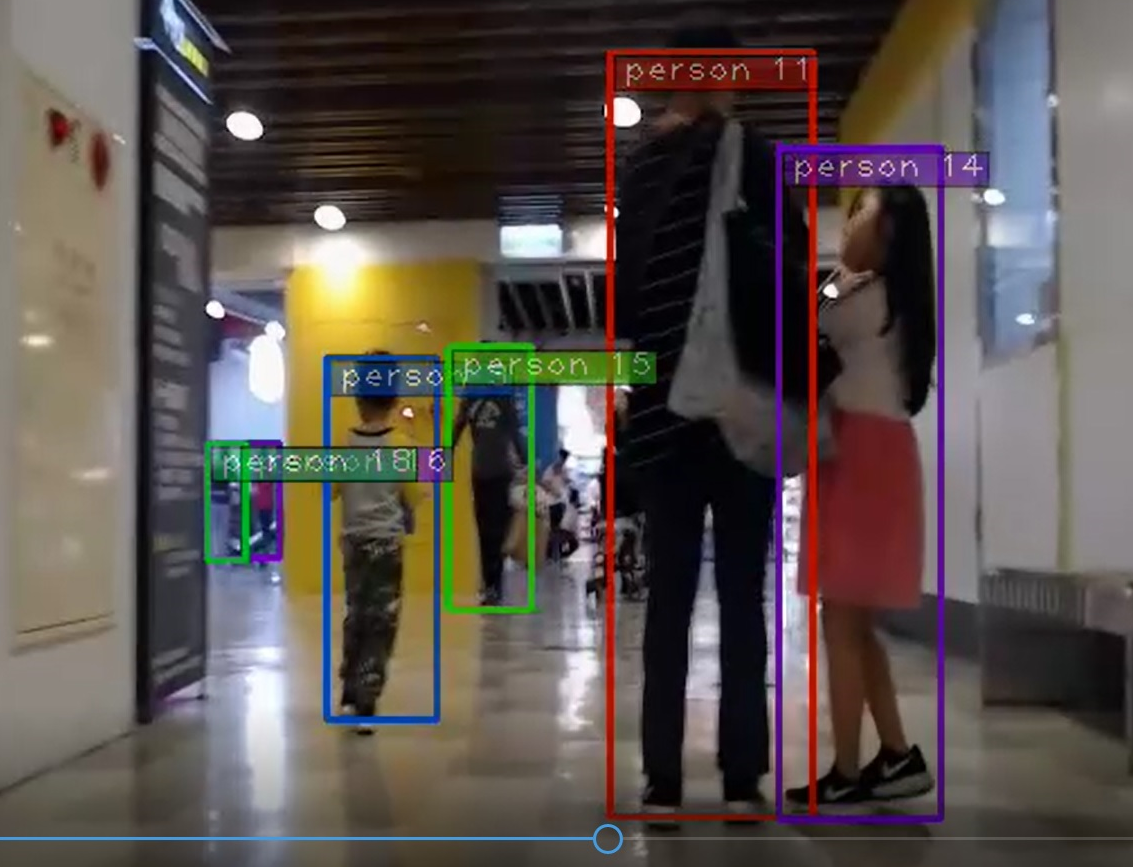
GFLOPs-aware AI model architecture optimization, GoP-mode real-time detection and HiTag auto-labeling system
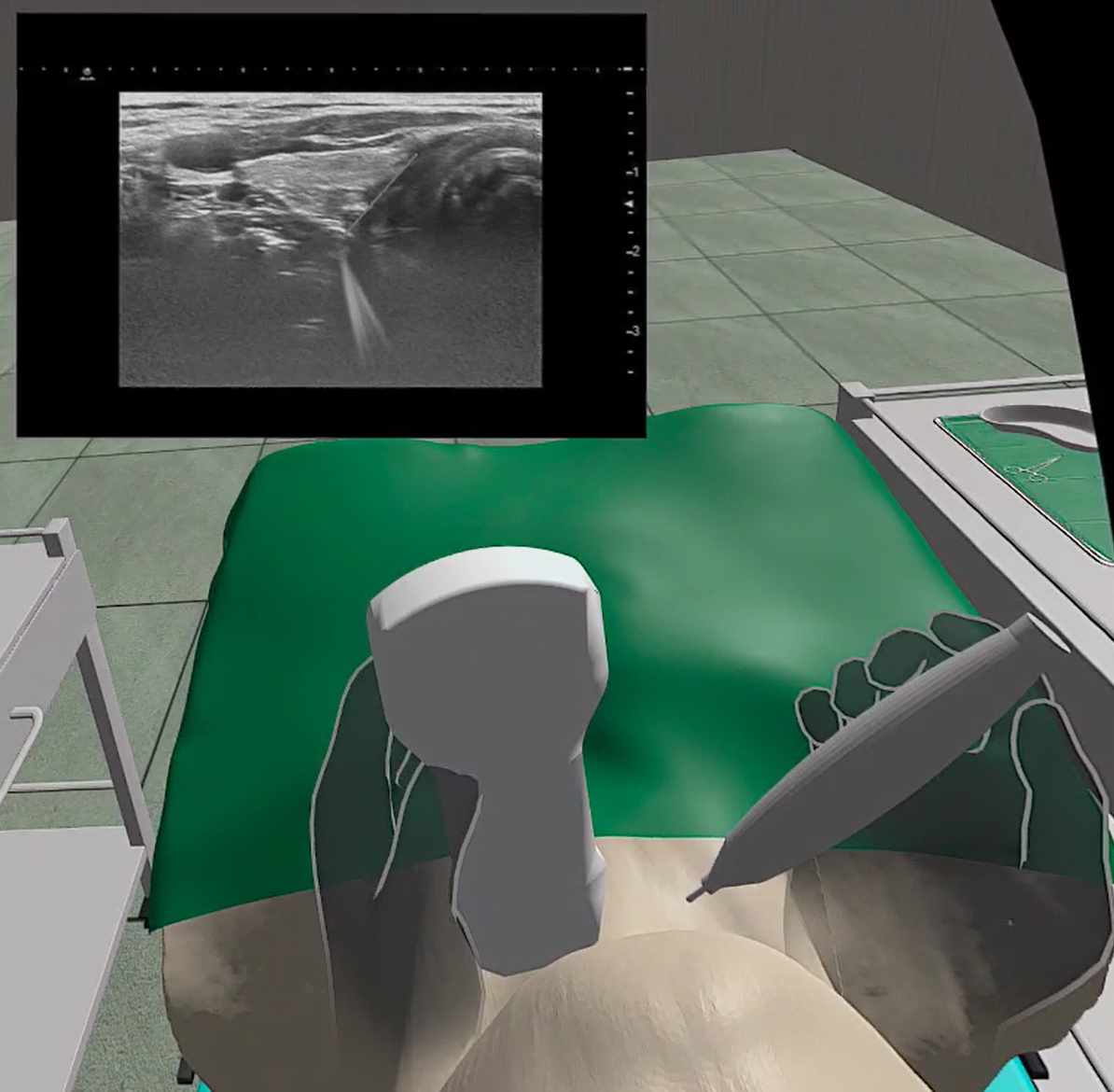
Metaverse-Driven Extended Reality for Ultrasound-Guided Invasive Therapeutic and Surgical Training System
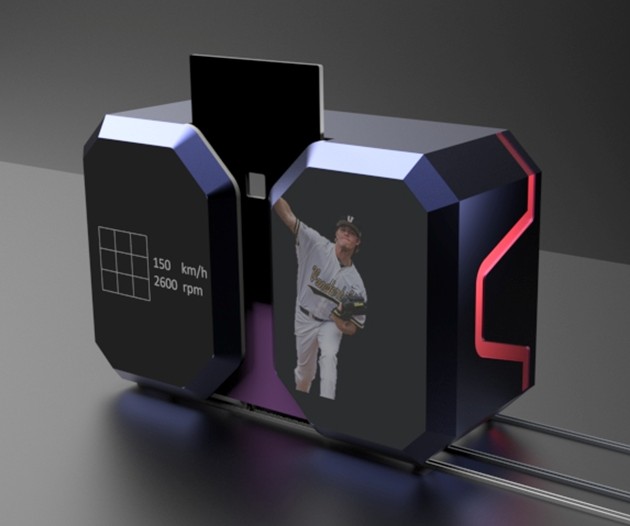
Commissioned Project by Taiwan Institute of Sports Science – Development and Research of Taiwan Smart Pitching Machine
Technology maturity:Others
Exhibiting purpose:Display of scientific results
Trading preferences:Negotiate by self
*Organization
*Name
*Phone
*Main Purpose
*Discuss Further
*Job Category
*Overall Rating
*Favorite Area
*Key Tech Focus
*Willing to Receive Updates?
Other Suggestions
Coming soon!