變電所巡檢作業為維護電網可靠運行的重要工作,近來因機器人相關技術快速發展,如能讓機器人執行巡檢、遠端監控、紅外線熱點偵測、異常警報通知等功能,將可大幅提升巡檢的效能。
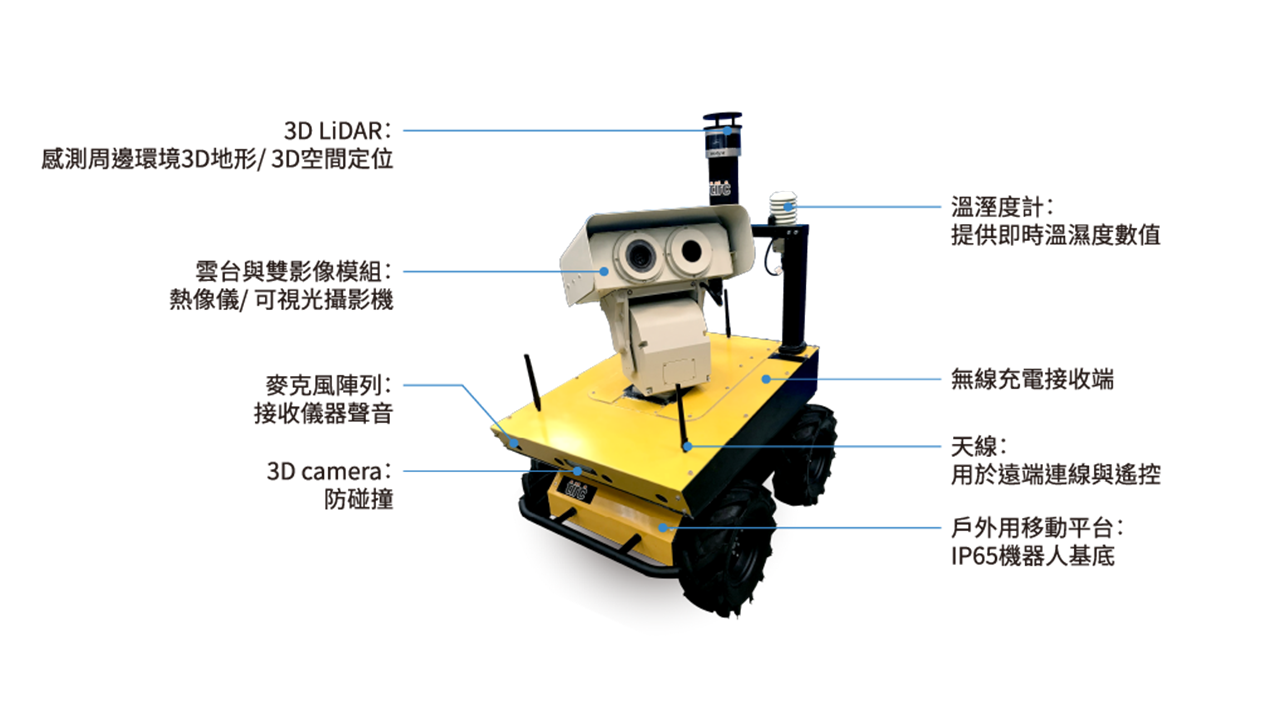
本計畫根據國內外案例與現地勘查,關鍵之處在於考量導入場域之地形環境特性,需滿足柏油路面、水泥路面、碎石子路面、斜坡、路面高低差,考量以上需求後,2D LiDAR不適用於有高低變化的場所,因此決定定位導航以3D LiDAR 為主,在影像巡檢元件設計上,使用可見光與熱影像兩種視覺影像感測模組。熱影像採用紅外線成像系統,此非接觸式成像及感溫功能,可判斷設備溫度與線材接頭點溫度,避免錯失第一時間的檢查甚至是維修;可視光攝影機擁有10變焦功能,可提供1920*1080 pixels 60fps更新頻率,能清楚知道異常事件發生的位置。音訊部分使用麥克風陣列設計,偵測巡檢過程中偵測到的異音,最後則是選擇以較具代表性且地形環境複雜的萬華二次變電所作為後續驗證場域。
針對功能開發與系統整合的部分,由於前段提到的變電所內地形環境特性,結合3D LiDAR與慣性測量單元(IMU),使用3D即時定位與地圖構建演算法進行地圖建置,並針對不同區域的電網以及巡邏點的繪製來獲取完整的變電所地圖資訊,藉由周圍障礙物件定位機器人的座標與位置並同時繪製地圖,後續依據此地圖開發導航功能,事先進行排程要求機器人到各指定點進行巡檢,包括偵測不同區域的異常溫度以及異音。讓機器人實現自我導航及任務排程,導航內也結合了倒車入庫,使得機器人有能力自行回到預先設置的充電小屋進行無線充電。
中控端軟體介面的開發滿足了從遠端進行監控以及控制的需求,監視機器人的巡檢過程,若是發現異常溫度或是異常聲響,隨時發出警報通知監控人員以便進行第一時間的檢查。
巡檢機器人硬體開發及系統整合完成後,進行長時間場域驗證與測試。讓機器人在不同時間、天候條件下運行的驗證測試,與台電相關人員進行多次會議,以此提出改進設計,以掌握未來商轉時,可以快速建置與廣泛使用。
線上展網址:
https://tievirtual.twtm.com.tw/iframe/d0ffcd90-d0ba-4b98-b152-793da95792ef?group=f36efffd-9ee6-4962-aa09-72f6797d2449&lang=tw
技術成熟度:雛型
展示目的:商機推廣、研發成果展示
流通方式:技術授權/合作
*服務單位
*姓名
*電話
*您參觀這項展品的主要目的?
*您是否希望進一步洽談
*您的職務類別
*展覽整體評價
*最喜歡的展區
*期待展覽著重的技術領域
*是否願意收到電子報/最新資訊
其他建議
敬請期待!