Multi-purposes Autonomous UAV inspection system based on multi-modality sensor fusion
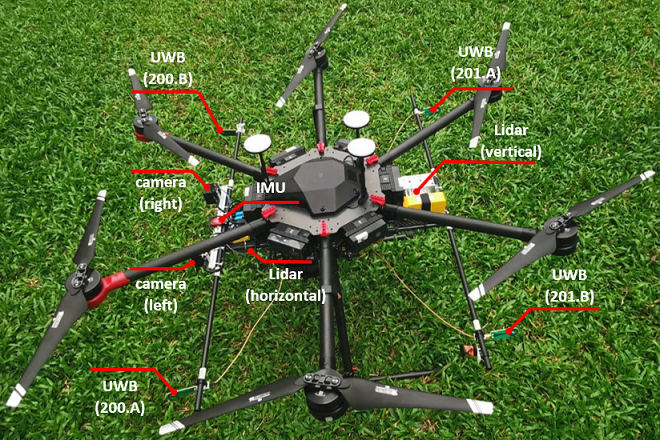
The proposed technology is a fully integrated navigation solution for urban structure inspection. The system is built on a visual-inertial-range-and-LIDAR (VIRAL) fusion-based simultaneous localization and mapping system (SLAM). The VIRAL SLAM can work both indoor and outdoor in all lighting conditions. In urban navigation, the GPS is likely to suffer from a multi-path effect. The proposed system can effectively solve the multi-path effect drift problem. The proposed system does not drift and can achieve mm-level accuracy.
On top of the robust SLAM system, a fast auto path planning system is introduced for easy path generation and flight control. Even the simple manual input path is far away from the actual object, the auto replanned path can keep a fixed distance away from the building and perform inspection. Thus detailed texture can be obtained and be processed by AI system for defect analysis.
Inaugurated on 1 July 1991, Nanyang Technological University (NTU) started out as a teaching university which has today transformed into a research-intensive global university. Its predecessor institution, Nanyang Technological Institute (NTI), was set up in 1981 on the grounds of the former Nanyang University to educate practice-oriented engineers for the burgeoning Singapore economy. In 1991, NTI was reconstituted as Nanyang Technological University, incorporating the National Institute of Education. The alumni rolls of the former Nanyang University were transferred to NTU in 1996. NTU became autonomous in 2006 and is today one of the two largest public universities in Singapore.
Name:Toh Bee Khim
Phone:+65 69041370
Address:71 Nanyang Drive, #03-01, NTU Innovation Centre, Singapore 638075
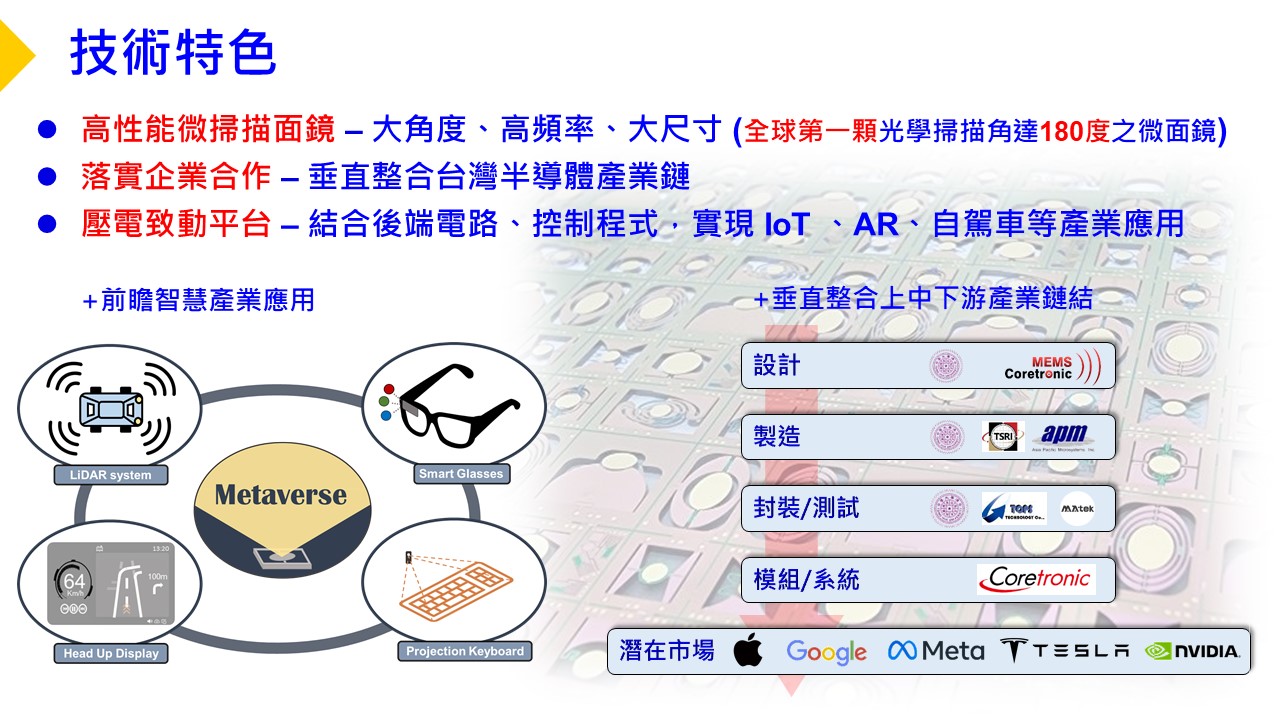
Development of Piezoelectric MEMS Scanning Mirror for Autonomous Ve hicles (AVs) and Augmented Reality (AR) applications

Creating a Multi-Faceted Utilization Model for Remote Healthcare-Intellig ent Healthcare Technology with Multi-Ethnic Adaptability
Method for adjusting output power for induction type power supply system and related supplying-end module
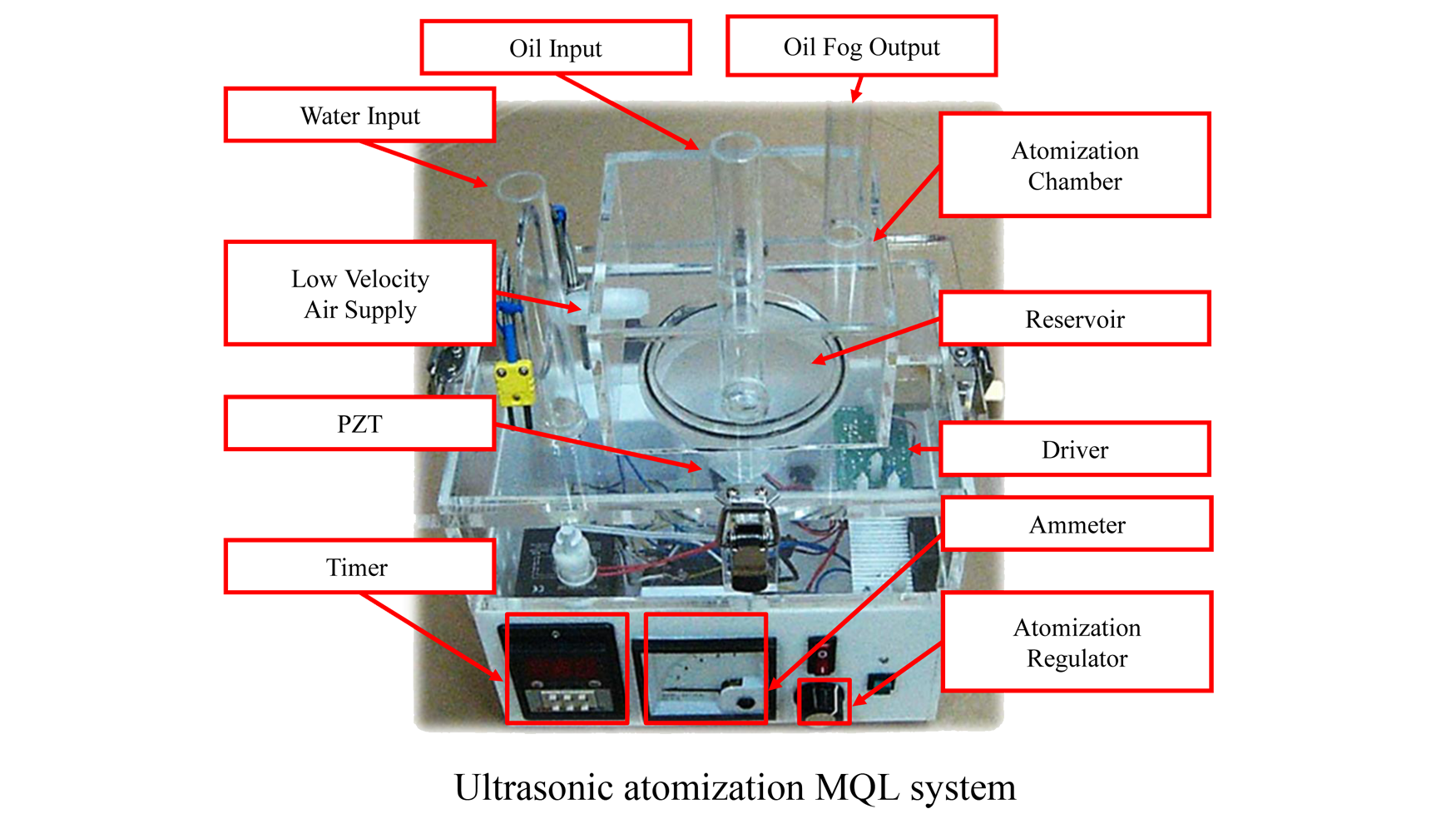
Nanofluid/ultrasonic atomization micro-lubrication system development and application intelligent modeling method to improve the multiple quality characteristics of the micro-machining process research and optimal prediction model establishment
Technology maturity:Prototype
Exhibiting purpose:Technology transactions、Patent transactions
Trading preferences:Negotiate by self
*Organization
*Name
*Phone
*Main Purpose
*Discuss Further
*Job Category
*Overall Rating
*Favorite Area
*Key Tech Focus
*Willing to Receive Updates?
Other Suggestions
Coming soon!