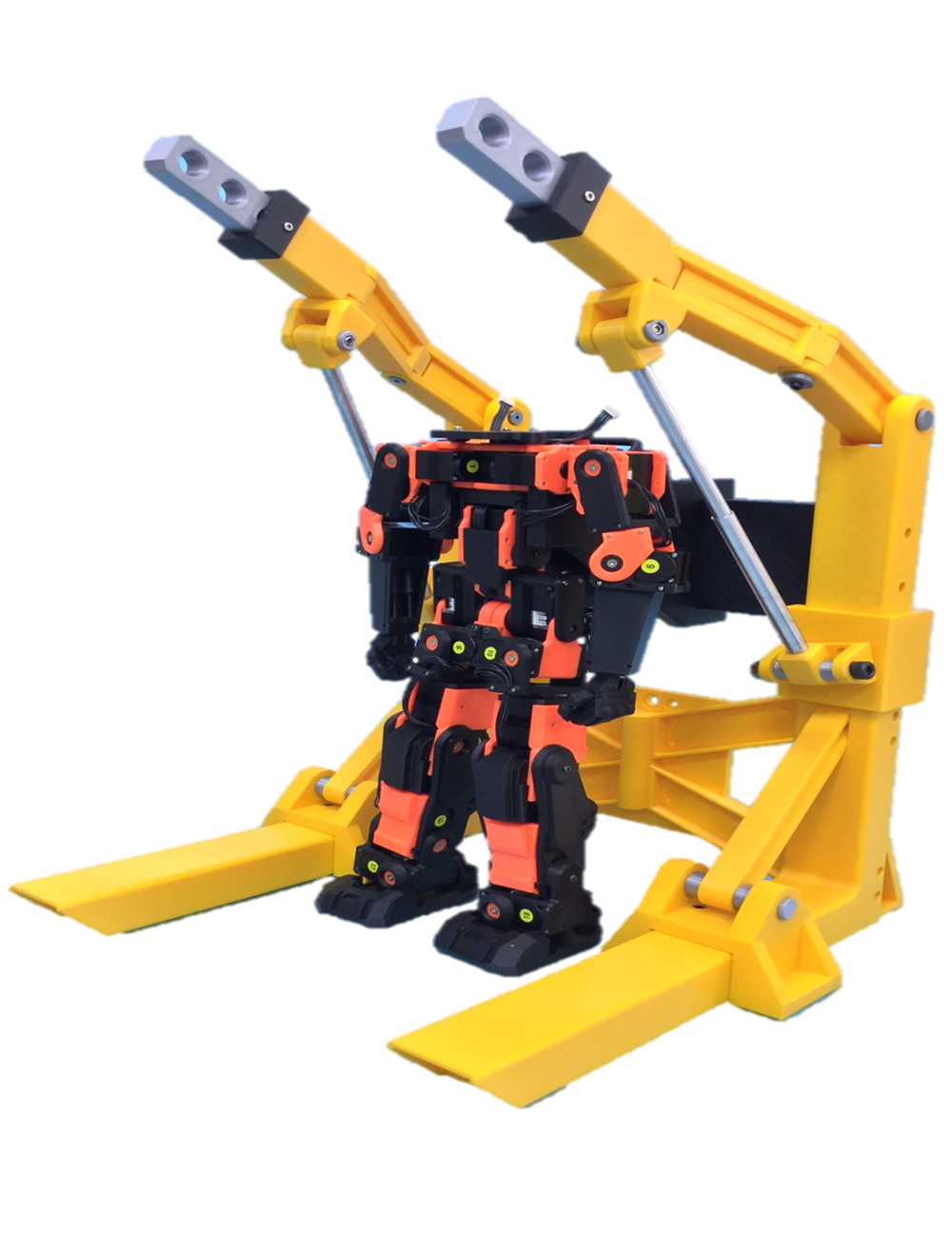
多數外骨骼仍採用傳統屈膝式來輔助穿戴者行動,不僅需耗費較大能量;且無法完全貼近人類行為模式。本研究提出適用於外骨骼輔助之直膝式步態,內容包含關鍵元件致動器雛型系統之開發,並將致動器雛型系統應用於自製之小型仿人機器人上,進而實現直膝式外骨骼控制模擬步態之模型驗證。
本院為國軍最高軍事科技學府,以培育國軍「戰鬥及技術勤務」人才為目標,教育內涵輔以完整之大學理工課程,融合具有軍人特質內容之全人教育配套措施,教導學生成為一位有教養、有能力之軍官紳士淑女,以加入國防科技研發之建軍行列。
技術成熟度:概念
展示目的:研發成果展示
流通方式:技術授權/合作
*服務單位
*姓名
*電話
*您參觀這項展品的主要目的?
*您是否希望進一步洽談
*您的職務類別
*展覽整體評價
*最喜歡的展區
*期待展覽著重的技術領域
*是否願意收到電子報/最新資訊
其他建議
敬請期待!