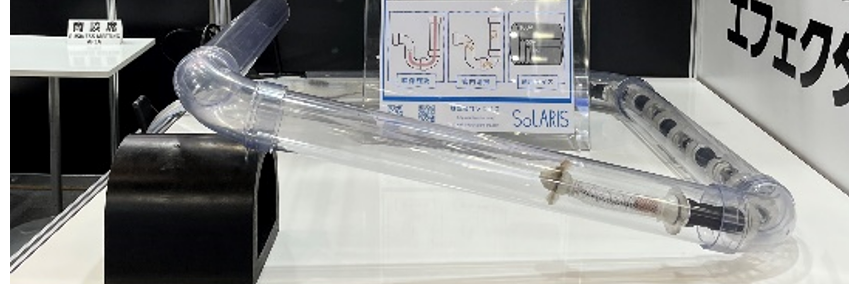
SoLARIS已經開發出了仿效蚯蚓移動方式的機器人。我們的蚯蚓機器人內部配備了人造肌肉,這些肌肉貫穿整個機器人的身體。每個肌肉的收縮和舒張會像蚯蚓一樣在機器人的身體中形成一波收縮,從而讓機器人前進。這種設計讓機器人能夠利用極少的空間來移動。這樣的機器人可以用於檢查管道,因為它們可以更好地在狹窄通道中穿梭而不會卡住。蚯蚓機器人也可以比內視鏡攝像頭更容易處理尖銳的轉彎。
在數位盛行的今天,模擬的力量才是所需。 不論是在產業界或各行各業,機器人扮演的角色與日俱增。正因如此,一件事情變得非常明顯:這世上有太多未知數和無法預期的情況存在。面對這些,我們需要什麼?我們認為,就是機器人本身要具備根據周遭環境的複雜性和不可預測性,進而改變和適應的靈活性。除了由數位控制、高速和高精度驅動的機器人,具模擬和關係性控制、柔軟變通的軟體機器人,其重要性將日益提升,我們對此深信不疑。我們的核心技術是以空氣驅動的軟化人造肌肉(軟體驅動器)及其控制技術,其中蘊含許多不容易模仿的模擬知識。我們將持續追求獨特的核心技術,引領這個在全球仍相當新穎的軟體機器人技術領域,實現其社會應用。
技術成熟度:雛型
展示目的:可交易技術
流通方式:技術授權/合作
*服務單位
*姓名
*電話
*您參觀這項展品的主要目的?
*您是否希望進一步洽談
*您的職務類別
*展覽整體評價
*最喜歡的展區
*期待展覽著重的技術領域
*是否願意收到電子報/最新資訊
其他建議
敬請期待!