Development of a straighten-knee walking system for exoskeleton and verified on a small sized humanoid robot
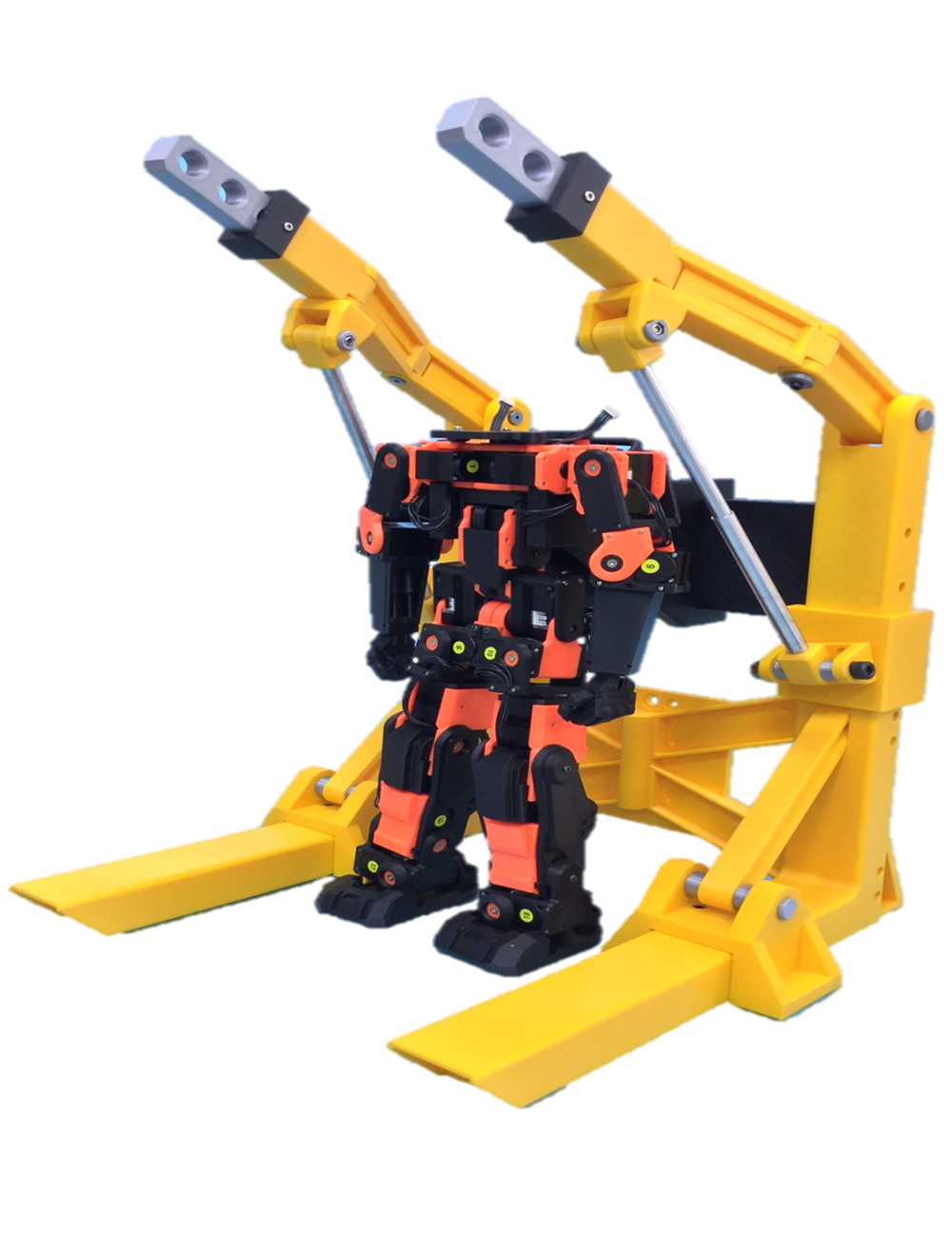
Most exoskeletons use the knee bent walking method which derived from humanoid robot to assist the wearer’s locomotion. Knee bent walking not only cost a lot of energy consumption, but its behavior is also inconsistent with human motion. This study proposes a human-like gait model which is more suitable for exoskeleton usage. Import this model into a customized small humanoid robot that using a self-develop smart servo motor to confirm the theory.
In line with the current national policy of building small and strong armed forces and improving military education, in May 2000 the Armed Forces University, National Defense Medical College, National Defense Management College, and Chung Cheng Institute of Technology were integrated into one university, National Defense University(NDU).
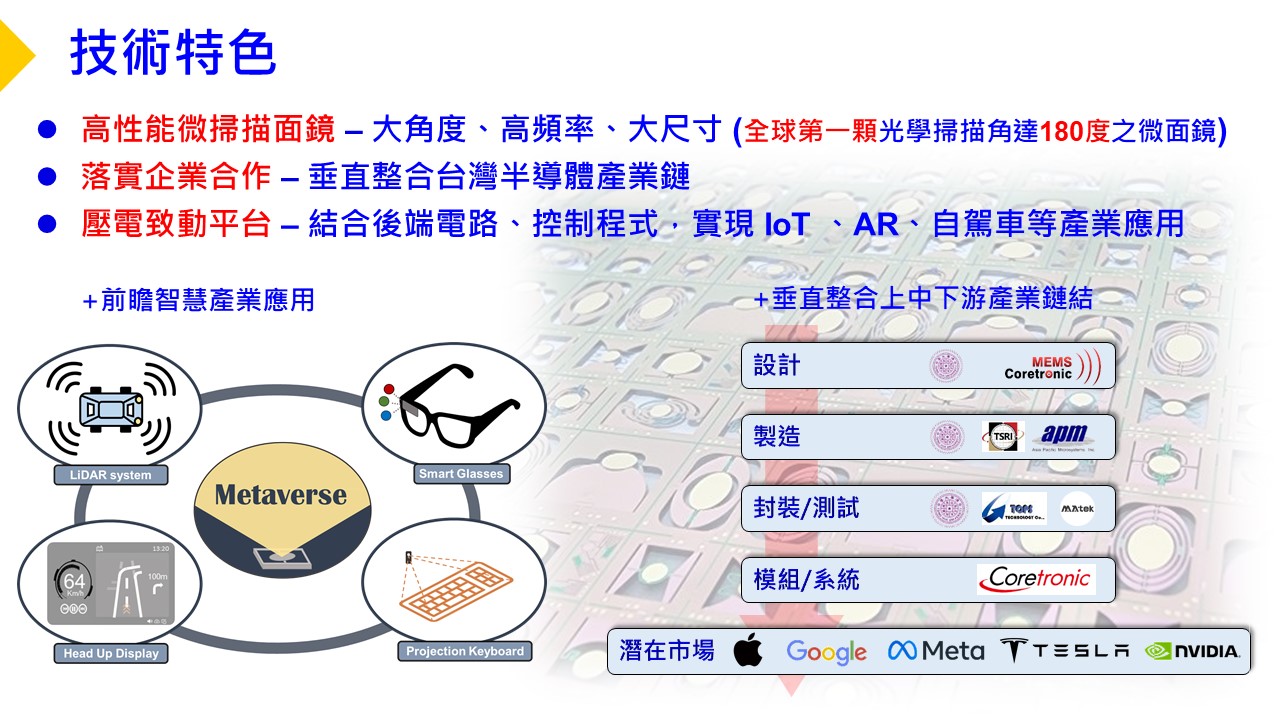
Development of Piezoelectric MEMS Scanning Mirror for Autonomous Ve hicles (AVs) and Augmented Reality (AR) applications
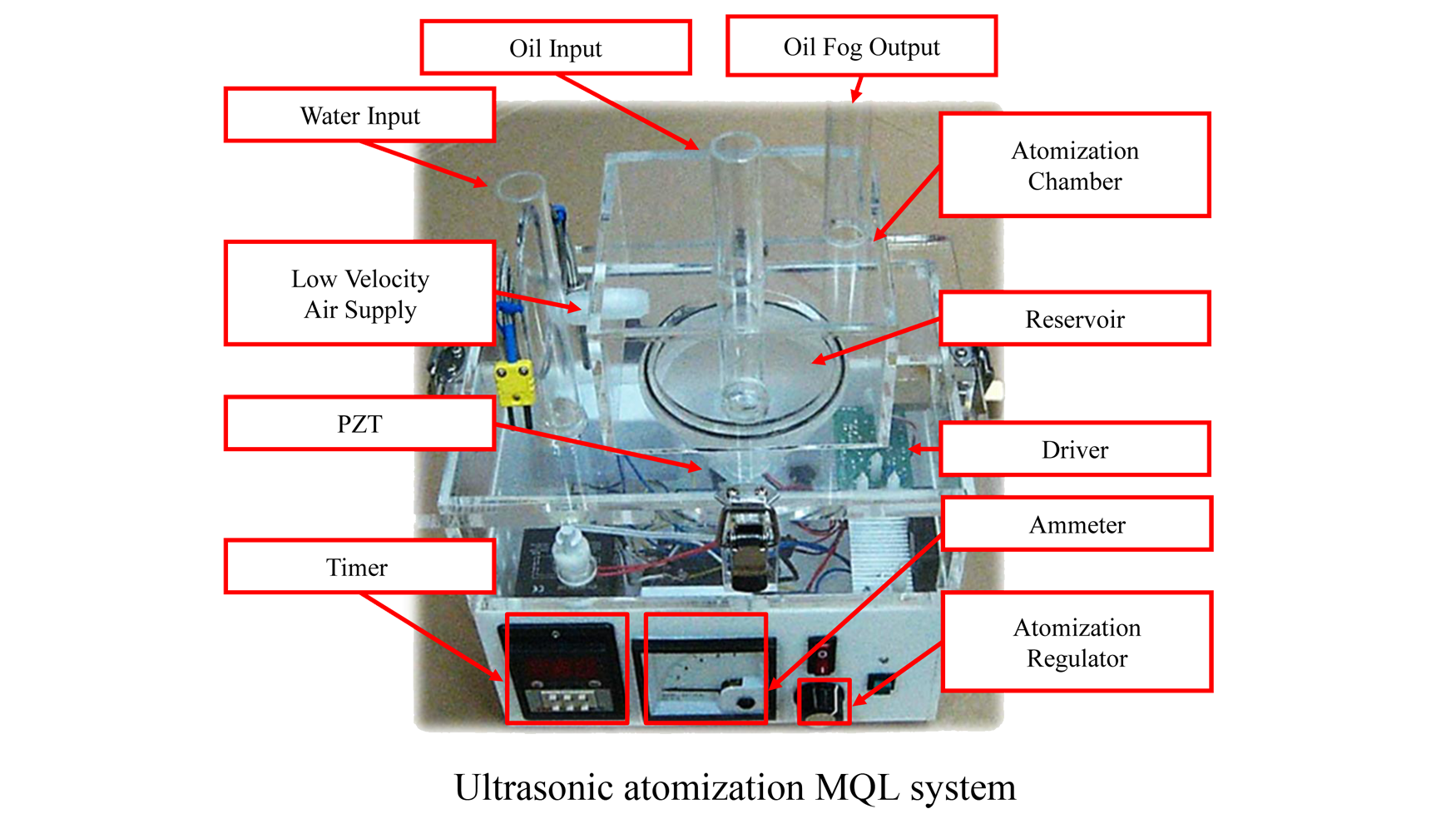
Nanofluid/ultrasonic atomization micro-lubrication system development and application intelligent modeling method to improve the multiple quality characteristics of the micro-machining process research and optimal prediction model establishment
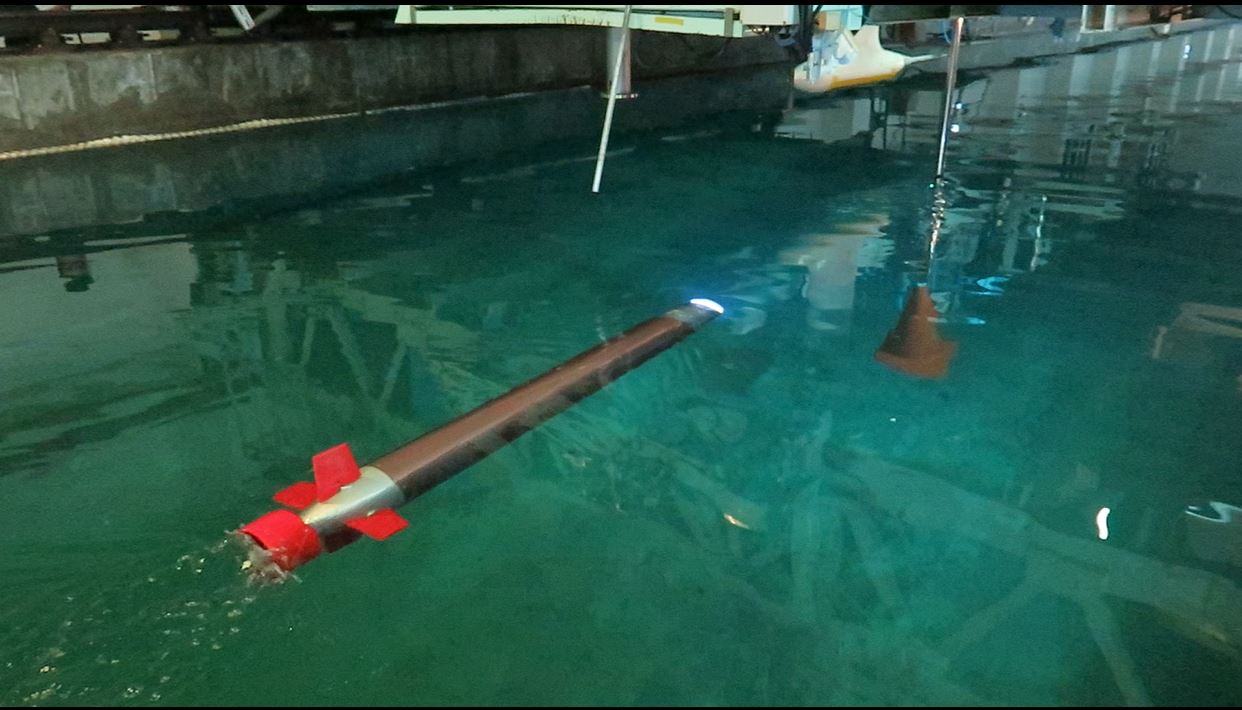
The Development of Innovative Technologies of Optical and Acoustic Systems for the Autonomous Underwater Vehicle
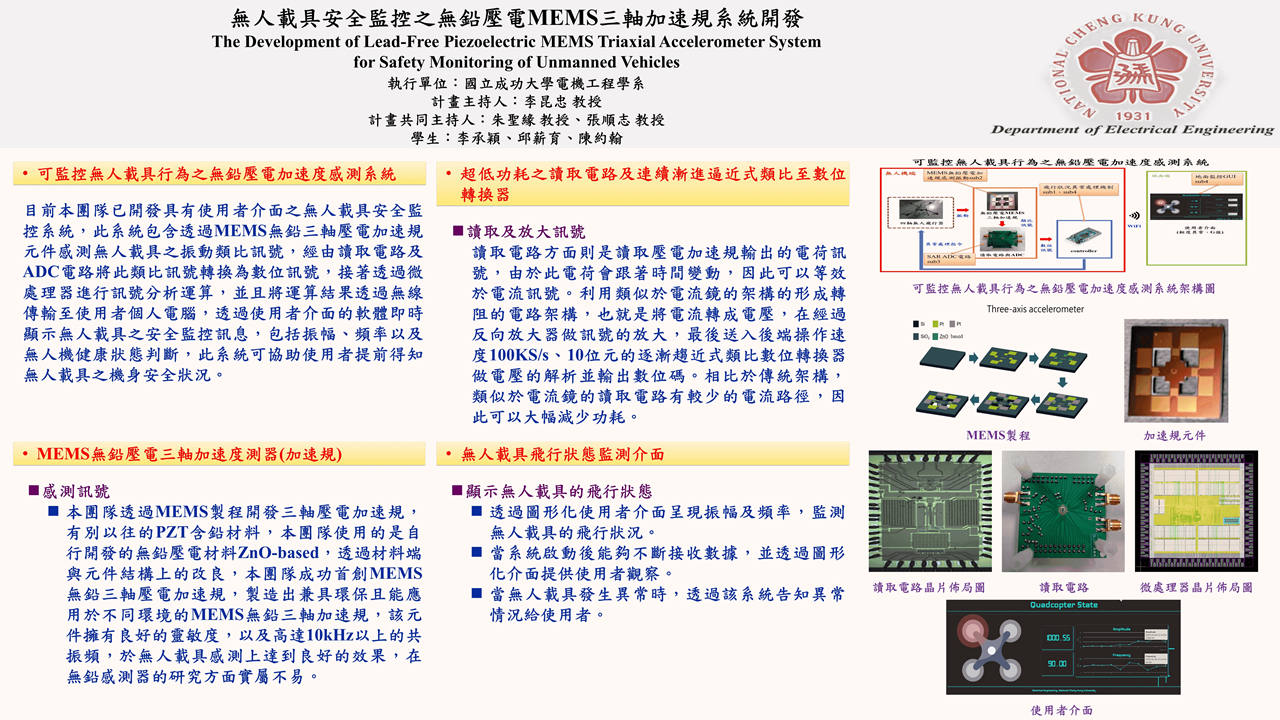
The Development of Lead-Free Piezoelectric MEMS Triaxial Accelerometer System for Safety Monitoring of Unmanned Vehicles
Technology maturity:Concept
Exhibiting purpose:Display of scientific results
Trading preferences:Technical license/cooperation
*Organization
*Name
*Phone
*Main Purpose
*Discuss Further
*Job Category
*Overall Rating
*Favorite Area
*Key Tech Focus
*Willing to Receive Updates?
Other Suggestions
Coming soon!